Sponsor: GDOT
The objective of this project was to develop and evaluate advanced strategies for Emergency Vehicle Preemption (EVP) and Transit Signal Priority (TSP) implementation that would incorporate and integrate real-time information from Connected Vehicles (CV), transit vehicles, traffic signal controllers, and other traffic detection technologies to improve overall performance relative to current practice.
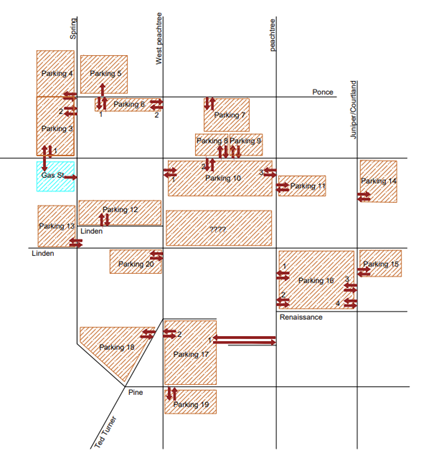
Task 01 of this study demonstrated the benefits of using EVP combined with CV technology, by developing a dynamic preemption (DP) logic and implementing it in a microscopic simulation model. DP, with either Normal or In-step exit transitions, led to an approximate 20% (~125 s) reduction in average travel time for an ERV when the ERV traversed through a series of eight preemption-enabled signalized intersections on a high-volume congested corridor. The DP algorithm provided a significantly larger reduction in travel time of the ERV than a traditional check-in-check-out detector-based preemption (~55 s) as compared to the no-preemption case. The non-ERVs sharing the same path as the ERV also received a significant reduction in delay as a by-product of preemption, primarily due to the queue flush in front of the ERV.
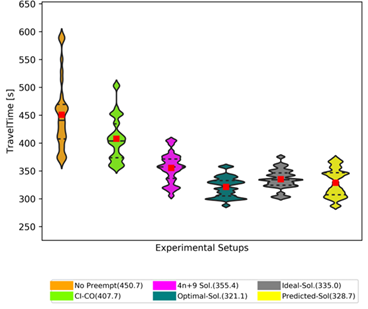
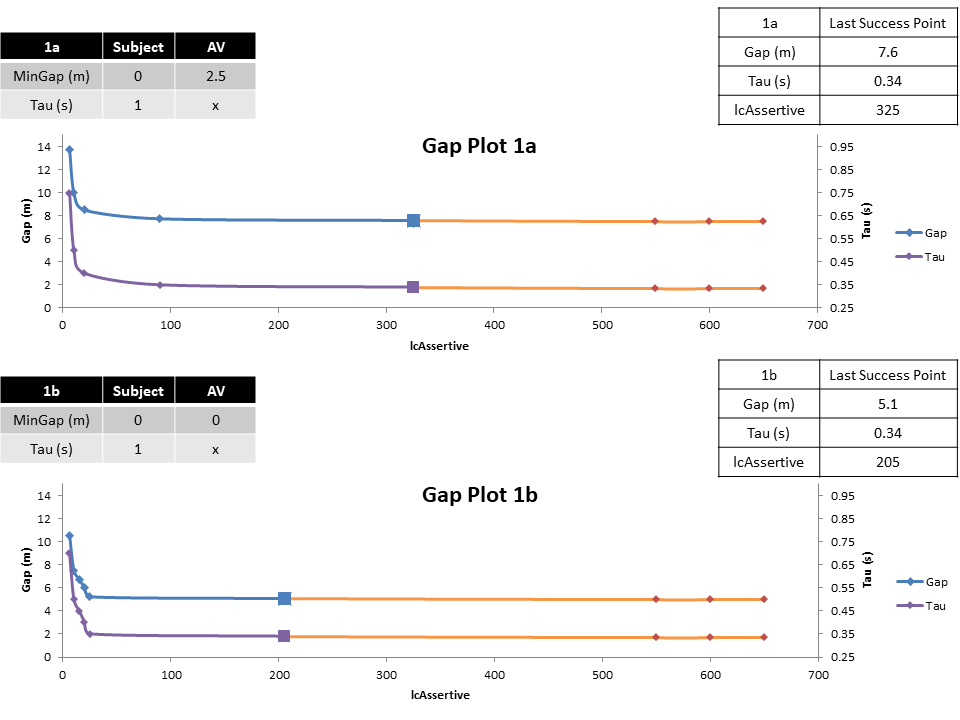
Task 02 developed machine learning algorithms to estimate optimal actuation times for EVP in the absence of complete real-time traffic state information that is feasible with CV and required for the DP logic. The ML-model based strategy developed here helps bridge the CV ramp up period gap by providing a methodology that works with the traditional data. The ML-model, trained using simulated data on the testbed, produced results that were better than the performance of the DP solution on the same ERV route.
Task 03 addressed the issue of the complex interactions between the general traffic and the ERVs. Realistic models are developed for driving behaviors for interactions between ERVs and non-ERVs which replicate the pull-over lane clearing behaviors that are observed in the real world in response to ERVs. The study generated External Driver Model dynamic linked libraries for Vissim® that can be integrated by others for preemption studies to integrate pull-over behavior in the models and provide a realistic baseline that will prevent an unrealistically optimistic bias in the results.
Task 04 studied the impact of TSP strategies. Overall, it is seen that TSP performance is most favorable in lower v/c conditions where far side bus stops are present and thus lower uncertainty in ETA, which is critical to TSP effectiveness. Compared to Early green, Green extension provides the most benefit to individual buses.
However, as congestion increases the effectiveness of TSP decreases. On a highly congested corridor, i.e., v/c ratios approaching or exceeding 1.0, it is possible that TSP may become infeasible as the non-TSP movements may have insufficient slack in available capacity. The signal timing for optimal transit vehicle performance may not be optimal for other vehicles in the network. For instance, it was seen that slightly higher cycle lengths or adjusted offsets compared to those for demand based optimal signal settings may result in better TSP performance and lower impacts to non-transit vehicles during TSP events.
Recommendations
Using a dynamic logic for preemption is recommended under most circumstances where real-time traffic information is available. In cases where accurate queue estimates are not available from the field, ML models can be used to work with conventional vehicle detection data streams. Choice between normal and in-step exit strategies will need to take into consideration factors such as the demands and turn ratios at the intersections, the use of coordination on the relevant corridor, etc.
Based on the findings from the pull-over modeling study an additional argument can be made for deploying EVP to avoid disruption to the traffic along the path of the ERV. It is clear that pull-over causes disruption to the traffic traveling in the same path as the ERV. The comparison of the non-ERV travel times between EVP and non-EVP scenarios, with pull-over integrated in the model, clearly shows that EVP can minimize the disruption with a relatively minor short-term disruption to the cross traffic.
When considering the setting of TSP on a transit designated corridor: If intersections with a v/c ratio on the order of 0.95 or higher exist, it is recommended to consider slightly longer cycle lengths (on the order of 10 to 30 seconds) to determine if additional slack in the timing may be obtained. The general traffic delay will need to be checked, comparing the optimal cycle length vs transit cycle length, to determine the acceptability of this option. Where bus stops exist upstream of an intersection offsets that maximize the opportunity for bus passage should be investigated. Intersection dwell time distributions should be included in the modeling of the signal timing.
In higher v/c situations where conflicting movement delay is highly sensitive to TSP, it may be desirable to limit TSP to GE as GE tends to higher benefits with lower impacts than EG. The selection of low (free flow) vs high (congestion based) estimated time of arrival (ETA) should be considered in relation to the corridor objectives. While free flow speed based ETA will likely provide overall better service, where the focus is on congested conditions, longer ETA may prove a more suitable option. Where possible, AVL (or other) solutions that allow for flexibility in the selection or application of ETA should be considered. While beyond the scope of a signal timing only effort, consideration should be given, where possible, to the placement of bus stops on the far side rather than near side of an intersection. Every corridor has unique characteristics, and thus each corridor should be modeled to determine the most effective application of these recommendations. However, key to the application of any transit timing is that transit timing be considered as part of the signal timing objectives rather than an afterthought to be applied by “tweaking” the general traffic “optimal” results.